I2C 开发指南
1. I2C 流程
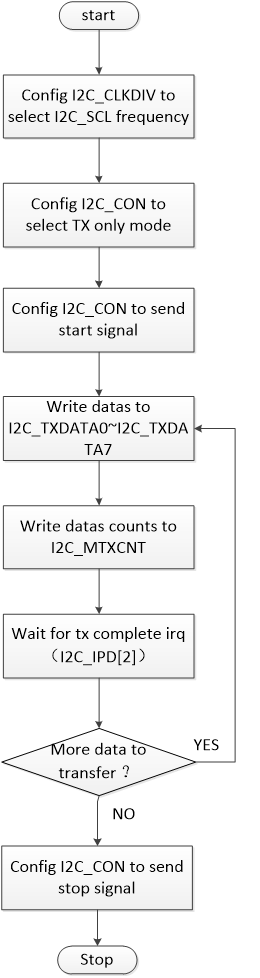
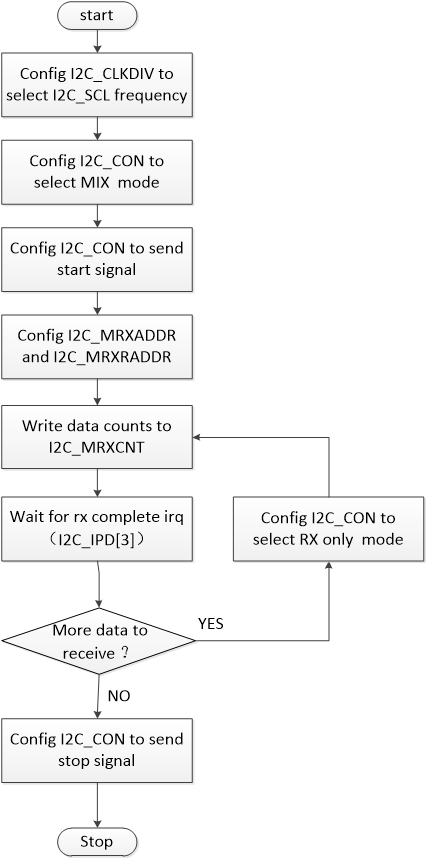
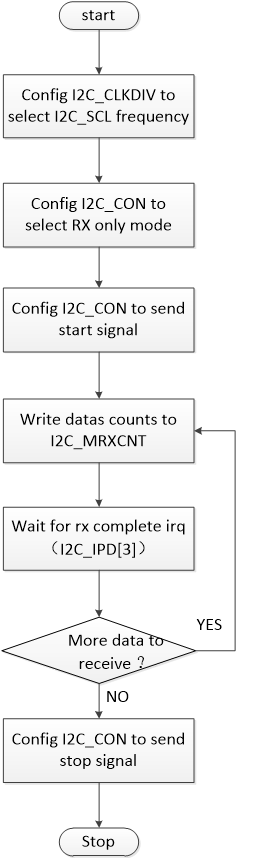
I2C 的流程在两个驱动上大致是一样,写是单纯的 TX 模式 (I2C_CON[1:0]=2’b00),而读一般使用 TRX 模式 (I2C_CON[1:0]=2’b01)。下面的 I2C 控制器操作流程图是描述软件如何通过这个 I2C 控制器寄存器来配置和执行 I2C 任务。描述分为 3 部分:传输模式,混合模式和接收模式。
1.1 Trasmint only mode (I2C_CON[1:0]=2’b00)
1.2 Mix mode (I2C_CON[1:0]=2’b01 or I2C_CON[1:0]=2’b11)
1.3 Receive only mode (I2C_CON[1:0]=2’b10)
以上为 I2C 的主要流程,详细实现参考驱动代码。
2. I2C 驱动参数配置
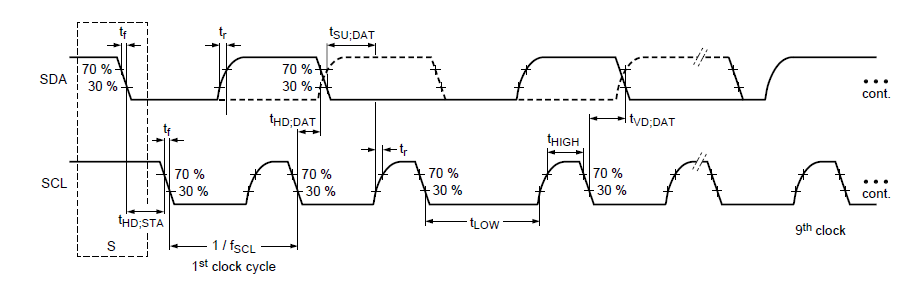
I2C 的参数配置最主要就是 I2C 频率的配置。可配 I2C frequency 除了与芯片有关外,主要是由 I2C SCL rise time 决定的,因为 I2C 协议标准里面对上升沿和下降沿时间有规定要求,特别是上升沿时间。如果超过了协议规定的最大值,则 I2C 通讯可能失败。下面是协议里面规定的最大最小值范围,下图表示了二者之间的关系:

上升沿 Tr 和下降沿 Tf,需要用示波器测量,参考下面示图:
I2C 的驱动 i2c-rk3x.c 与 i2c-rockchip.c 两个配置方式是不一样的,区别如下:
2.1 i2c-rk3x.c 配置
i2c-rk3x.c 驱动的配置都在 DTS,参考文件 Documentation/devicetree/bindings/i2c/i2c-rk3x.txt。重点说明其中配置项,i2c-scl-rising-time-ns,i2c-scl-falling-time-ns:
clock-frequency:默认 frequency 为 100k 可不配置,其它 I2C 频率需要配置,最大可配置频率由i2c-scl-rising-time-ns决定。例如配置 400k:clock-frequency=<400000>。i2c-scl-rising-time-ns:SCL 上升沿时间由硬件决定,改变上拉电阻可调节该时间,需通过示波器量测,参考上图。例如测得 SCL 上升沿 365ns:i2c-scl-rising-time-ns=<365>。(默认可以不配置,但必须保证当前的上升沿时间不能超过所配置频率下的 I2C 标准所定义的最大上升沿时间)。i2c-scl-falling-time-ns:SCL 下降沿时间,一般不变,等同于i2c-sda-falling-time-ns。(默认也可以不配置)
&i2c1 {
status = "okay";
i2c-scl-rising-time-ns = <265>;
i2c-scl-falling-time-ns = <11>;
clock-frequency = <400000>;
es8316: es8316@10 {
#sound-dai-cells = <0>;
compatible = "everest,es8316";
reg = <0x10>;
clocks = <&cru SCLK_I2S_8CH_OUT>;
clock-names = "mclk";
spk-con-gpio = <&gpio0 11 GPIO_ACTIVE_HIGH>;
hp-det-gpio = <&gpio4 28 GPIO_ACTIVE_LOW>;
};
};
2.2 i2c-rockchip.c 配置
i2c-rockchip.c 驱动仍然遵循 I2C frequency 与 SCL 上升沿的约束关系,能否用更高的频率取决于 i2c-scl-rising-time-ns。I2C 频率在代码上面配置,直接配置 i2c_msg 结构体上的 scl_rate 成员,默认 frequency 仍为 100k。例如下面的 200K 配置:
struct i2c_msg xfer_msg;
xfer_msg[0].addr = client->addr;
xfer_msg[0].len = num;
xfer_msg[0].flags = client->flags;
xfer_msg[0].buf = buf;
xfer_msg[0].scl_rate = 200 * 1000; /* 200K i2c clock frequency */
3. I2C 使用
对于 I2C 的使用说明,在 Documentation/i2c/ 中有比较详细的内容可供查阅。下面重点提到读写部分:
3.1 Kernel space
Rockchip I2C 的读写通信使用的是 Linux 的标准接口。请参考 kernel 目录下的 Documentation/i2c/writing-clients 文档说明,其中的 Sending and receiving 部分有系统的介绍。
3.2 User space
通常,I2C 设备由内核驱动程序控制。但也可以从用户态访问总线上的所有设备,通过 /dev/i2c-%d 接口来访问。kernel 目录下的 Documentation/i2c/dev-interface 文档有详细说明与示例。
4. I2C tools
I2C tool 是一个开源工具,需自行下载进行交叉编译,代码下载地址: https://www.kernel.org/pub/software/utils/i2c-tools/
或者
<git clone git://git.kernel.org/pub/scm/utils/i2c-tools/i2c-tools.git>
编译后会生成 i2cdetect,i2cdump,i2cset,i2cget 等工具,可以直接在命令行上调试使用:
- i2cdetect – 用来列举 I2C bus 和上面所有的设备
- i2cdump – 显示 I2C 设备所有 register 的值
- i2cget – 读取 I2C 设备某个 register 的值
- i2cset – 写入 I2C 设备某个 register 的值
I2C tool 都是开源的,编译与使用请参考其中的 README 与帮助说明。
5. GPIO 模拟 I2C
I2C 用 GPIO 模拟,内核已经有实现,请参考文档:
Documentation/devicetree/bindings/i2c/i2c-gpio.txt
下面是使用的例子,在 DTS 下配置 I2C 节点:
i2c@4 {
compatible = "i2c-gpio";
gpios = <&gpio5 9 GPIO_ACTIVE_HIGH>, /* sda */
<&gpio5 8 GPIO_ACTIVE_HIGH>; /* scl */
i2c-gpio,delay-us = <2>; /* ~100 kHz */
#address-cells = <1>;
#size-cells = <0>;
pinctrl-names = "default";
pinctrl-0 = <&i2c4_gpio>;
status = "okay";
gt9xx: gt9xx@14 {
compatible = "goodix,gt9xx";
reg = <0x14>;
touch-gpio = <&gpio5 11 IRQ_TYPE_LEVEL_LOW>;
reset-gpio = <&gpio5 10 GPIO_ACTIVE_HIGH>;
max-x = <1200>;
max-y = <1900>;
tp-size = <911>;
tp-supply = <&vcc_tp>;
status = "okay";
};
};
一般不推荐使用 GPIO,因为效率不高。
6. I2C 常见问题
因为我们有两个 i2c 驱动,所以仍然分两部分:
6.1 i2c-rk3x.c 驱动
如果调用 I2C 传输接口返回值为 -6(-ENXIO)时候,表示为 NACK 错误,即对方设备无应答响应,这种情况一般为外设的问题,常见的有以下几种情况:
- I2C 地址错误;
- I2C slave 设备处于不正常工作状态,��比如没有上电,错误的上电时序以及设备异常等;
- I2C 时序不符合 slave 设备所要求也会产生 NACK 信号,比如 slave 设备需要的是 stop 信号,而不是 repeat start 信号的时候;
- I2C 总线受外部干扰导致的,用示波器测量可以看到是一个 ACK 波形。
当出现 I2C 的 log:"timeout, ipd: 0x00, state: 1"时,此时 I2C 控制器工作异常,无法产生中断状态,start 时序无法发出,有以下几种可能:
- I2C SCL 或者 SDA Pin 脚 iomux 错误;
- I2C 的上拉电压不对,如电压不够或者上拉电源没有等;
- I2C Pin 脚被外设拉住,电压不对;
- I2C 时钟未开,或者时钟源太小;
- I2C 同时配置了 CON_START 和 CON_STOP 位。
当出现 I2C 的 log:"timeout, ipd: 0x10, state: 1"时,此时 I2C 控制器工作正常,但是 cpu 无法响应 I2C 中断,此时可能 cpu0 被阻塞了(一般 I2C 中断都在 cpu0 上面,通过 cat /proc/interrups 可以查看),或者可能是 I2C 中断位被关闭了。
当出现 I2C 的 log 类似:"timeout, ipd: 0x80, state: 1"时,看到 ipd 为 0x80 打印,可以说明当前 SCL 被 slave 拉住,要判断被哪个 slave 拉住:
- 一是排除法,适用于外设不多的情况,而且复现概率高;
- 二是需要修改硬件,在 SCL 总线上串入电阻,通过电阻两端产生的压差来确定,电压更低的那端外设为拉低的 slave,电阻的选取以不影响 I2C 传输且可以看出压差为标准,一般上拉电阻的 1/20 以上都可以,如果是 host 拉低也可以看出。另外在此基础上通过示波器来抓取波形更加直观,比较不同 slave 和 host 的低电平大小,与最后出问题时的低电平大小比较,相等的就是拉低总线的“元凶”。
常见的情况是 sda 被拉低,证明是谁拉低的,同样参考上面 ��“SCL 被拉低" 的方法两种。
6.2 i2c-rockchip.c 驱动
如果调用 I2C 传输接口返回值为 -11(-EAGAIN )时候,表示为 NACK 错误,即对方设备无应答响应,这 种情况一般为外设的问题,常见的有以下几种情况:
- I2C 地址错误;
- I2C slave 设备处于不正常工作状态,比如没有上电,错误的上电时序以及设备异常等;
- I2C 时序不符合 slave 设备所要求也会产生 NACK 信号,比如 slave 设备需要的是 stop 信号,而不是 repeat start 信号的时候;
- I2C 总线受外部干扰导致的,用示波器测量可以看到是一个 ACK 波形。
当出现 I2C 的 log:"timeout, ipd: 0x00, state: 1"时,此时 I2C 控制器工作异常,无法产生中断状态,start 时序无法发出,有以下几种可能:
- I2C SCL 或者 SDA Pin 脚 iomux 错误;
- I2C 的上拉电压不对,如电压不够或者上拉电源没有等;
- I2C Pin 脚被外设拉住,电压不对;
- I2C 时钟未开,或者时钟源太小;
- I2C 同时配置了 CON_START 和 CON_STOP 位。
当出现 I2C 的 log:"timeout, ipd: 0x10, state: 1"时,此时 I2C 控制器工作正常,但是 cpu 无法响应 I2C 中断,此时可能 cpu0 被阻塞了(一般 I2C 中断都在 cpu0 上面,通过 cat /proc/interrups 可以查看),或者可能是 I2C 中断位被关闭了。
当出现 I2C 的 log 类似:"timeout, ipd: 0x80, state: 1"时,看到 ipd 为 0x80 打印,或者看到"scl was hold by slave”的打印,可以说明当前 SCL 被 slave 拉住,要判断被哪个 slave 拉住:
一是排除法,适用于外设不��多的情况,而且复现概率高; 二是需要修改硬件,在 SCL 总线上串入电阻,通过电阻两端产生的压差来确定,电压更低的那端外设为拉低的 slave,电阻的选取以不影响 I2C 传输且可以看出压差为标准,一般上拉电阻的 1/20 以上都可以,如果是 host 拉低也可以看出。另外在此基础上通过示波器来抓取波形更加直观,比较不同 slave 和 host 的低电平大小,与最后出问题时的低电平大小比较,相等的就是拉低总线的”元凶“。
常见的情况是 SDA 被拉低,证明是谁拉低的,同样参考上面 “ scl was hold by slave"的方法两种。
当出现 log “i2c is not in idle(state = ×)”的 log 时,表示 I2C 总线至少一个为低,解决办法参考上面:
- “state=1” 表示 SDA 为低;
- “state=2” 表示 SCL 为低;
- “state=3” 表示 SCL 和 SDA 都为低。
6.3 Debug 之 I2C 波形
如果遇到的 I2C 问题以上情况都不是,最好的办法是抓取 I2C 出错时候的波形,通过波形来分析 I2C 问题,I2C 的波形非常有用,大部分的问题都能分析出来;可以在出错的地方让 cpu 卡住(比如 while(1) 等),不发起新的 I2C 任务,最后抓到的波形应该就是出错的波形,如果需要过滤还可以加入设备 I2C 地址的判断条件等。